
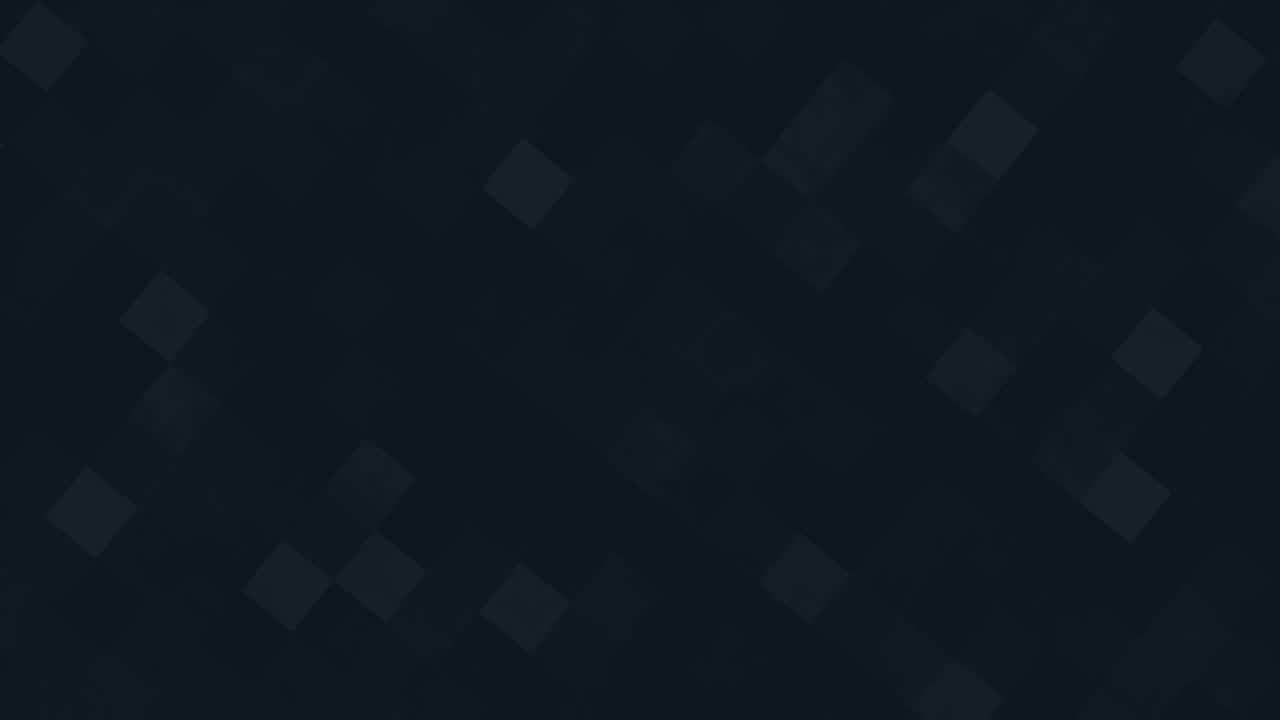
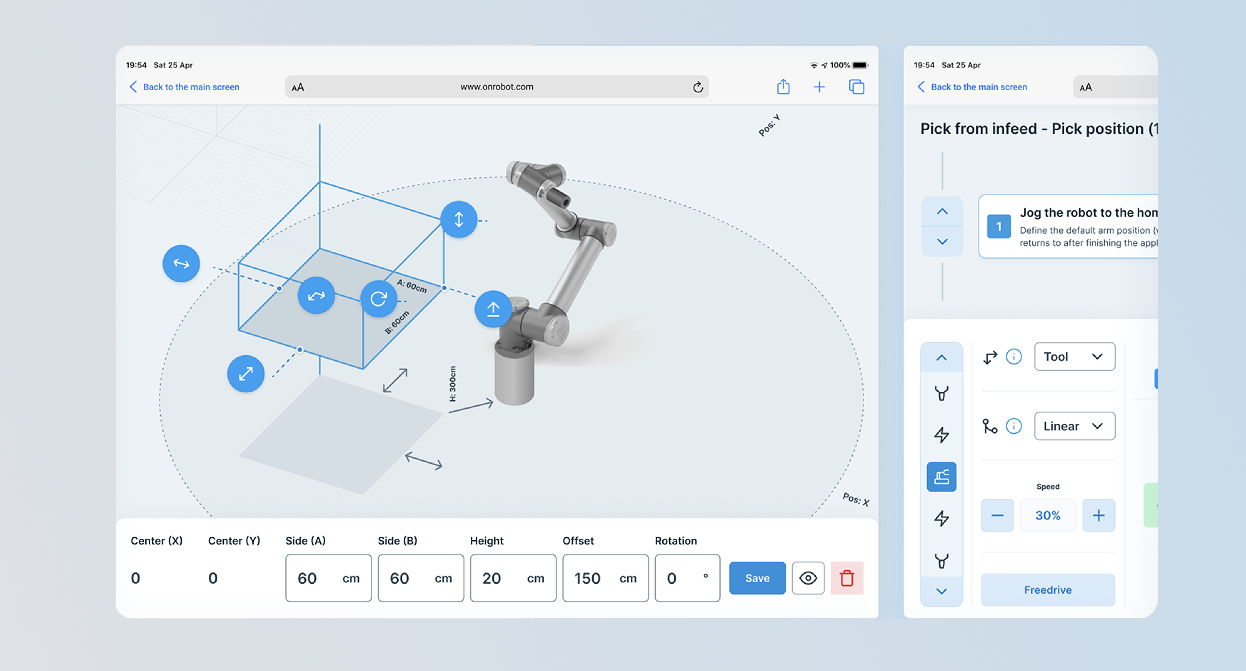
Turned messy robot math into something normal people can use. Instead of scripting or Excel geometry, we built a nocode 3D workspace with guided steps that still preserves the level of precision robots need like down to centimeters and degrees and runs smoothly on an iPad with gloves on.
OnRobot was about taking something that should require an engineer robot setup and making it feel natural to operators who would rather just get the job done.
The core trade off was precision vs. approachability. Robotics teams needed millimeter-level control; operators needed to see “move this here” and trust that nothing dangerous would happen. We decided to bring the complexity into a visual 3D workspace + parameter panels, instead of stuffing it into forms and manuals. That made setups feel like manipulating a scene, not programming a machine.
Nothing about this could have been solved from a conference room. The most important design work happened on the shop floor: watching how people actually rigged tasks, where they guessed, where they double checked with a colleague. Weekly reviews with robotics, HMI devs, and safety took that raw reality and hardened it into a system that cut setup time, slashed errors, and still passed internal safety scrutiny.

AI-Based Prediction Market

Full Ecosystem Redesign